小型化がますます重要になる現在、マイクロロボットの製造と組み立ては非常に広く注目されています。 しかし、ミクロの世界では、ほとんどの組立技術はマイクロモジュール(微小モジュール)を単純に並べることしかできず、全体を強固に組み立てることは困難である。
精密3Dプリント技術による小型ロボットの研究
最近では、BMFの精密印刷技術を使って50μm以下の細かい部品を作り、特殊な方法で面白いロボットに組み上げる研究者も出てきています。 本研究は、ACS Applied Materials & Interfaces誌に「Integrated Assembly and Flexible Movement of Microparts Using Multifunctional Bubble Microrobots」というタイトルで発表されました。
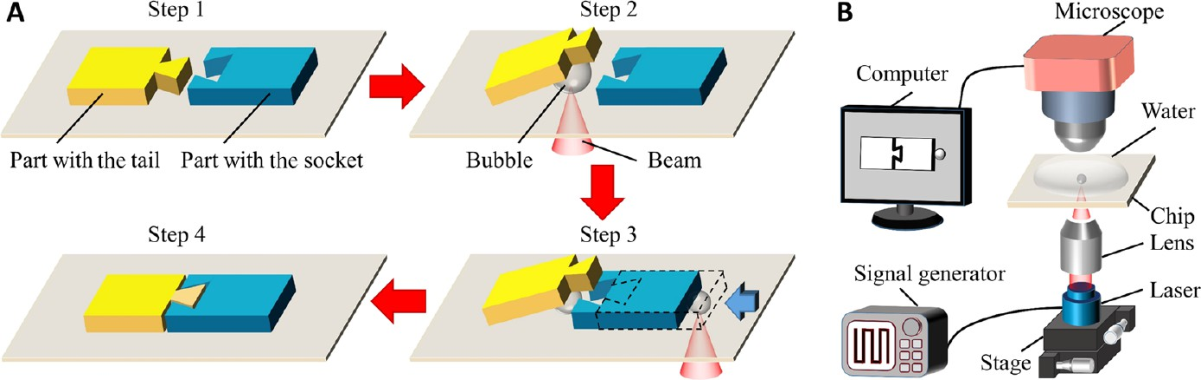
組み立てのは、4つのステップにまとめることができます。
- マイクロモジュールを近接配置させる。
- 特殊なバブル(気泡)を使い、片方のモジュールを持ち上げます。
- 別のバブル(気泡)で、もう一方のモジュールを持ち上げているモジュールに向かって押します。
- バブル(気泡)を取り除くことで、持ち上げられたモジュールがゆっくりと下がり、2つのモジュールが組み合わされます。
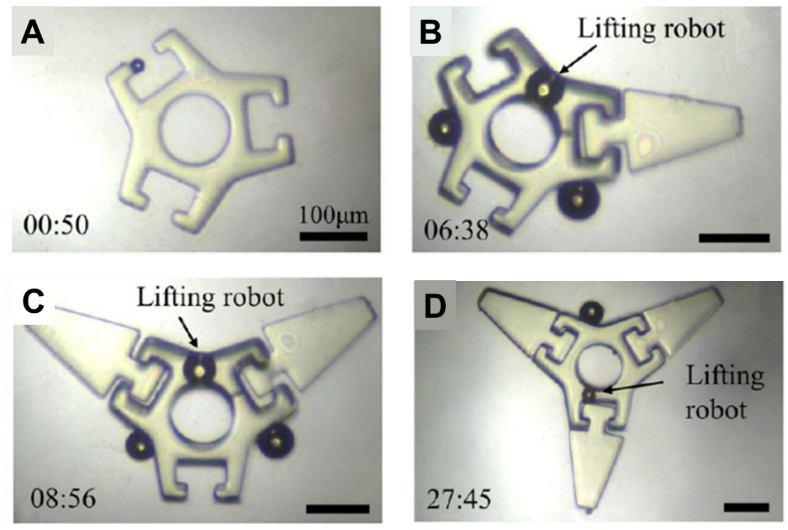
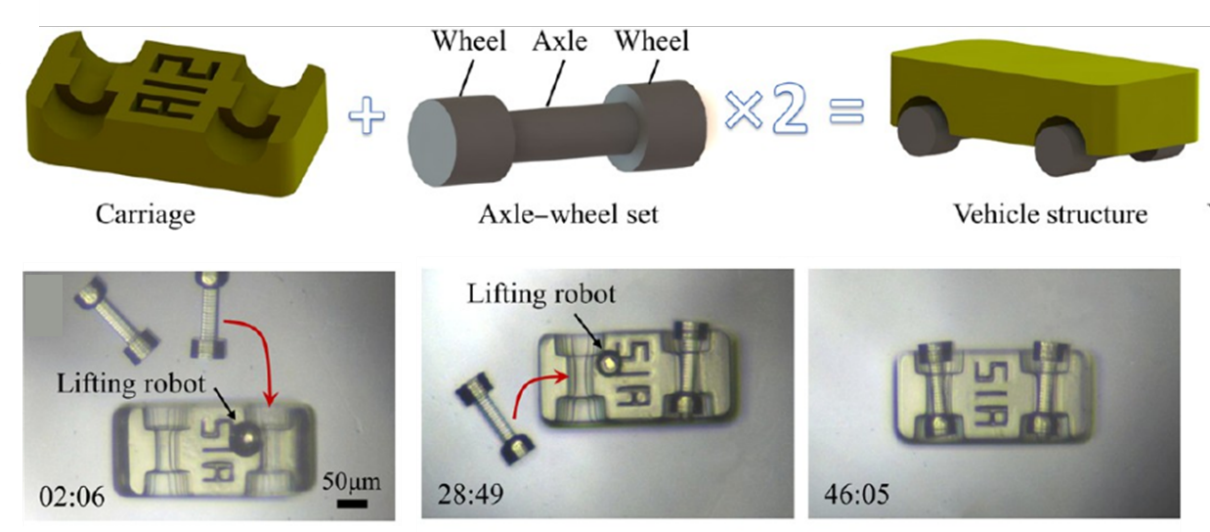
同じ手法で、もっと面白い小型ロボットも作りましたので、下の写真とビデオをご覧ください。
およびAgNiマイクロニードルアレイ(b)の製造プロセス.png)
